
Heading mode and offset
In Hydromagic, the heading is used to display the vessel shape on the map in the correct direction. In cases where the GNSS antenna and echo sounder are not in the same location, you need to make sure that the heading readings are correct, as they are used to calculate the position of the echo sounder location relative to the measured GNSS position.
Hydromagic supports two types of heading sensors, sensors that report true heading and sensors that report magnetic heading. In the next two chapters we'll explain the differences between various heading sensors.
True Heading
True heading is the heading as reported by a GNSS system. This heading is also called course over ground. When using a single GNSS antenna and receiver, the course over ground is calculated by comparing the latest position with the previous one. This method only gives accurate headings when your vessel is moving at a decent speed. If the GNSS position drifts, false headings will be reported
To get a more reliable true heading, you can use a RTK heading sensor or two separate RTK receivers connected to Hydromagic using the "RTK Heading Plugin" shipped with Hydromagic. Since there are two antennas mounted on your vessel, and the positions are accurate, the course can be calculated by comparing the GNSS positions reported by both antennas. This will result in an accurate course, even when the vessel is not moving or going slow.
A gyro compass is based on a fast-spinning disc and the rotation of the Earth. It is used to find the geographical direction automatically. A gyroscope is an important component of a gyro compass. A gyro compass will, in most cases, report the true heading. Another advantage is that a gyro compass cannot be distorted by metals. Some motion sensors contain a built-in gyro compass or magnetic compass.
Magnetic Heading
Magnetic heading can be measured using a magnetic compass by utilizing the Earth's magnetic field. This is accurate in most cases, but please note that metal constructions can cause interference with a magnetic compass.
Select heading mode
The heading mode switch allows you to switch between magnetic and true heading. This is especially useful when both a GNSS receiver and magnetic compass are connected. By forcing the software to use either the true or magnetic heading, GNSS data will not interfere with the data reported by a magnetic compass.
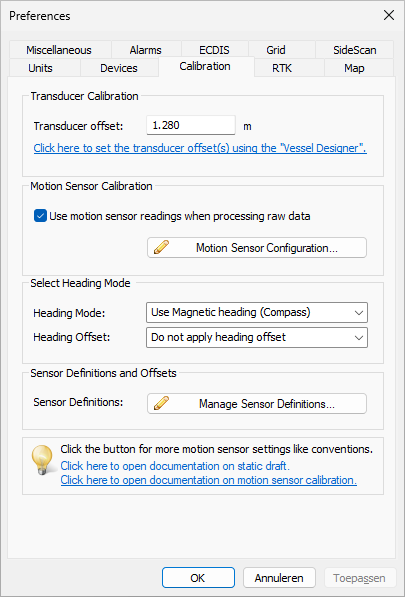
Select the "Preferences..." option from the "Options" menu.
To select the correct heading mode, select the "Preferences..." option from the "Options" main menu in the software. The preferences window appears and you must click the "Calibration" tab to access the heading mode setting.
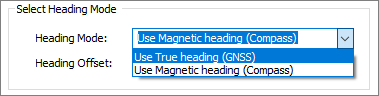
Select the preferred heading mode from the drop down list.
Select heading offset
The heading offset switch allows you to correct for an RTK heading sensor placed 90, 180, or 270 degrees relative to the north. Once this offset is set, it will simply be added to the measured heading. When an RTK heading sensor is mounted correctly or not used, you should set this value to 'Do not apply heading offset'.
Select the "Preferences..." option from the "Options" menu.
To select the correct heading mode, select the "Preferences..." option from the "Options" main menu in the software. The preferences window appears and you must click the "Calibration" tab to access the heading offset setting.
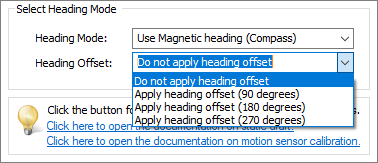
Select the preferred heading offset from the drop down list.