
Raw Data Filtering tool
Using the "Raw Data Filtering" tool should be your first step in order to clean your data. By removing obvious errors in measurement data, such as depth values lower than your static draft (echo sounder offset), or position observations calculated when, for example, the RTK fix was lost, you save yourself valuable time in the next step of the data cleansing process.
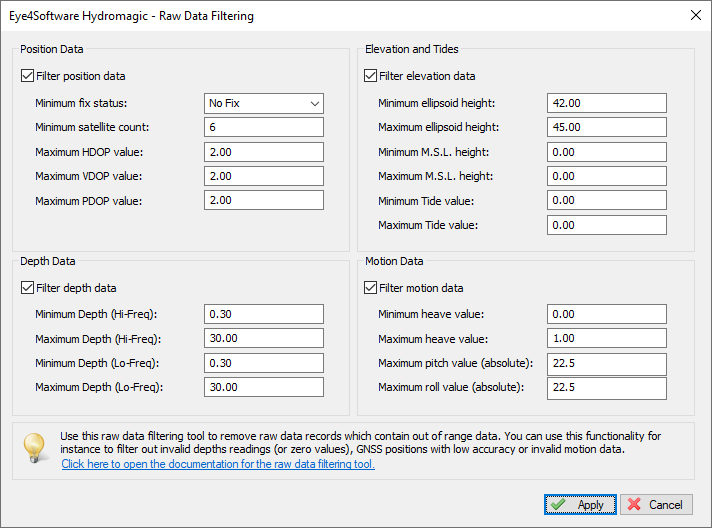
Use the "Raw Data Filtering" tool to remove records with out-of-range values from your raw data file(s).
Position data
This option can be used to filter out unreliable position data. This is especially important when the elevation data reported by your GNSS receiver is used to calculate tide levels. To enable this filter, check the "Filter position data" check box first. When enabled, you can enter maximum values for the dilution of precision data, as well as the minimum satellite count and GNSS fix quality.
When your project relies on RTK-fixed position data, you might want to delete all position records which are generated while the RTK-fix was temporarily lost. If this is the case, it is recommended to select the 'RTK Fixed' option for the "minimum fix status" setting. Do not use this filter if you plan to correct your positions with PPK (Post Processing Kinematic).
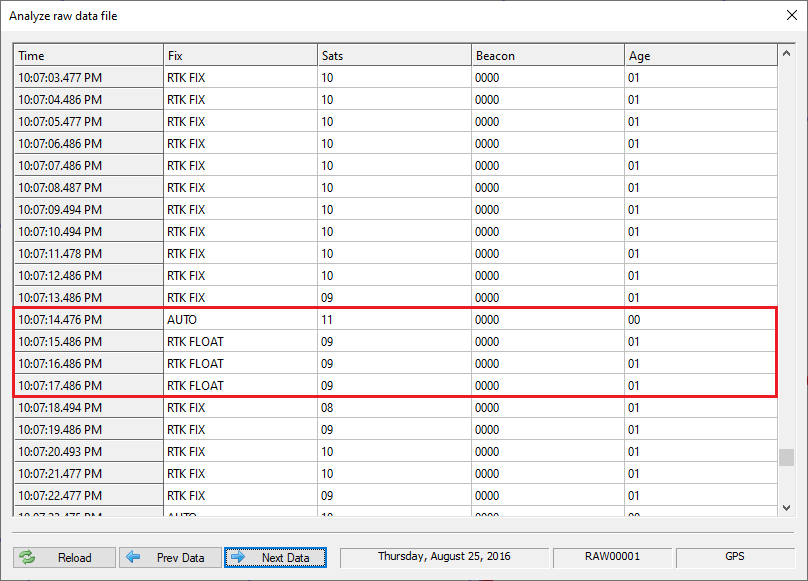
An example of a loss of RTK-Fix shown in the data analysis window.
Depth data (recommended!)
You should always enable the filter on the depth data to filter out measurement errors, since this is going to save you a lot of work when removing spikes from the sounding(s) using the echogram editor. For instance, when the motor of your vessel is set to reverse, it can cause some serious bubbles underneath your echo sounder transducer which will be visible as spikes in the echogram. This is because the sounder reports no depth value or a value of zero when it is unable to produce an accurate depth reading.
In addition, when you are pretty sure that the depth will never exceed 10 meters, you can set this as upper value for the depth range. Check the "Depth Data" check box to enable this filter. For the minimum depth value it is recommended to set the static draft (echo sounder offset) plus approximately 0.3 meter (or 1 feet), since most echo sounders are unlikely to report (accurate) depths below this value. For example, if the distance between the transducer and the waterline is 0.60 meter, set 0.90 meter as the lowest possible value.
If you are using a dual-frequency echo sounder, you can enter an alternative range measurement of low frequency depths. On the other hand, when using a single frequency echo sounder, the low frequency ranges are ignored when filtering the raw data file(s).

Air bubbles or water turbulence can cause spikes in your raw data.
Elevation and Tides
We recommend to use this filter option, when for instance a tide receiver is used. You will probably know the lowest and highest tide values for your area so that you can automatically omit any false readings. the same goes for the mean sea level and ellipsoidal fields. If you know the range for these values it doesn't hurt to check them by enabling this filter and checking the 'Filter elevation data' checkbox. When the settings for minimum and maximum value are both set to zero, the check will be ignored.
Motion data
This feature is only needed when using a motion sensor for pitch, roll, and heave. Check the "Filter motion data" check box, and enter the maximum angles for pitch and roll, and the expected range for heave corrections received from either the echo sounder or motion sensor. Disable this filter when no motion sensor was used during the survey.
Start filtering
When all filter options have been configured, click the "Apply" button to apply the filter to the selected raw data files. When one of the filters has been applied, new modified raw data files are written to the 'Modified' folder in your project root. When completed, you will return to the data correction page.